
Modelle für Virtuelle Realitäten
Die Evolution der Technik erlaubt es uns zunehmend, immer realistischere Umgebungen zu simulieren. Die Einsatzmöglichkeiten für virtuelle Realitäten sind nahezu unbegrenzt. Seien es Medizin, Lernumgebungen, komplexe Physiksimulationen oder Spiele, virtuelle Realitäten werden bereits in den verschiedensten Anwendungsfeldern eingesetzt. Dabei hat nicht nur die graphische Darstellung erhebliche Fortschritte gemacht, auch der Realismus der Simulationen hat sich durch immer komplexere physikalische Modelle dramatisch verbessert. Neue Interaktionsmethoden wie z.B. haptische Geräte haben ihren Teil dazu beigetragen, die Immersion eines Benutzers in eine virtuelle Umgebung immer vollständiger zu gestalten. Die Methoden, die zu diesem Zweck eingesetzt werden, sind genauso vielfältig wie die Anwendungsgebiete und werden kontinuierlich weiterentwickelt. In diesem Labor wollen wir Studenten mit den nötigsten Techniken vertraut machen, die speziell in der Physiksimulation virtueller Realtitäten zum Einsatz kommen.")
Schwerpunkte des Labors werden dabei sein:
- Simulation fester Objekte
- Deformierbare Körper
- Kollisionserkennung
- Kontaktmechanik
- Fluidsimulation
- Haptische Interaktion
Die Studenten werden mit einem vorgefertigten, modularen Framework arbeiten und ausgesuchte Funktionalität selbst implementieren um einen direkten Einblick in die Entwicklung physikalischer Simulationen zu bekommen.
Newton'sche Dynamik
Die Anwendung bekannter Erhaltungsprinzipien und den Newton'schen Gesetzen führt zu einer intuitiven Beschreibung physikalischer Systeme, die beispielsweise für Partikel- oder Starrkörpersimulationen zum Einsatz kommt. Das Labor wird eine kurze Einführung in die Grundlagen geben, und den Einsatz dieser vielseitigen Technik in verschiedenen Bereichen demonstrieren. Der aus dem zweiten Newton'schen Gesetz
F = m a = m r''
hergeleitete Ansatz führt zu einem einfachen Differentialgleichungssystem, für das verschiedene Lösungsstrategien vorgestellt werden, z.B. das explizite Eulerverfahren, in der die Ableitung durch die Differenz während eines Zeitschrittes angenähert.
 Die Diskussion beginnt bei einfachen Partikelsystemen, in denen die einzelnen Partikel nur eine Position, Geschwindigkeit und Masse besitzen. Diese Darstellung wird schrittweise erweitert, um komplexere Simulationen zu ermöglichen. Um Starrkörperphysik darstellen zu können, wird z.B. eine zusätzliche Beschreibung ausgedehnter Massen und deren Rotation unter der Einwirkung von Kräften benötigt. Eine Kollisionserkennung ermöglicht dann eine Interaktion zwischen einzelnen Objekten. Grundzüge der Kontaktmechanik werden vorgestellt, und in die Simulation integriert. Für die Simulation von deformierbaren Körpern verwenden wir anfangs eine Feder-Masse-Simulation, die einen guten Kompromiss zwischen Geschwindigkeit und zumindest visueller Genauigkeit darstellt.
Die Diskussion beginnt bei einfachen Partikelsystemen, in denen die einzelnen Partikel nur eine Position, Geschwindigkeit und Masse besitzen. Diese Darstellung wird schrittweise erweitert, um komplexere Simulationen zu ermöglichen. Um Starrkörperphysik darstellen zu können, wird z.B. eine zusätzliche Beschreibung ausgedehnter Massen und deren Rotation unter der Einwirkung von Kräften benötigt. Eine Kollisionserkennung ermöglicht dann eine Interaktion zwischen einzelnen Objekten. Grundzüge der Kontaktmechanik werden vorgestellt, und in die Simulation integriert. Für die Simulation von deformierbaren Körpern verwenden wir anfangs eine Feder-Masse-Simulation, die einen guten Kompromiss zwischen Geschwindigkeit und zumindest visueller Genauigkeit darstellt.
Textilsimulation
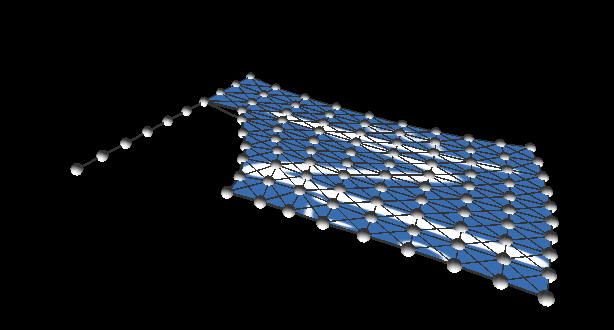
 Die Simulation von Feder-Masse-Systeme ermöglicht einem deformierbare Objekte wie Seile oder Textilien mit wenig Rechenaufwand zu simulieren. Zusätzlich zu den üblichen Federkräften werden spezielle Kräfte eingeführt, die wichtige Eigenschaften wie Biege- und Scherkräfte innerhalb eines Textils berücksichtigt. Dieses Modell ermöglicht die Simulation eines Textils so realistisch wie möglich zu machen ohne dabei die Echtzeitfähigkeit zu verlieren.
Die Simulation von Feder-Masse-Systeme ermöglicht einem deformierbare Objekte wie Seile oder Textilien mit wenig Rechenaufwand zu simulieren. Zusätzlich zu den üblichen Federkräften werden spezielle Kräfte eingeführt, die wichtige Eigenschaften wie Biege- und Scherkräfte innerhalb eines Textils berücksichtigt. Dieses Modell ermöglicht die Simulation eines Textils so realistisch wie möglich zu machen ohne dabei die Echtzeitfähigkeit zu verlieren.
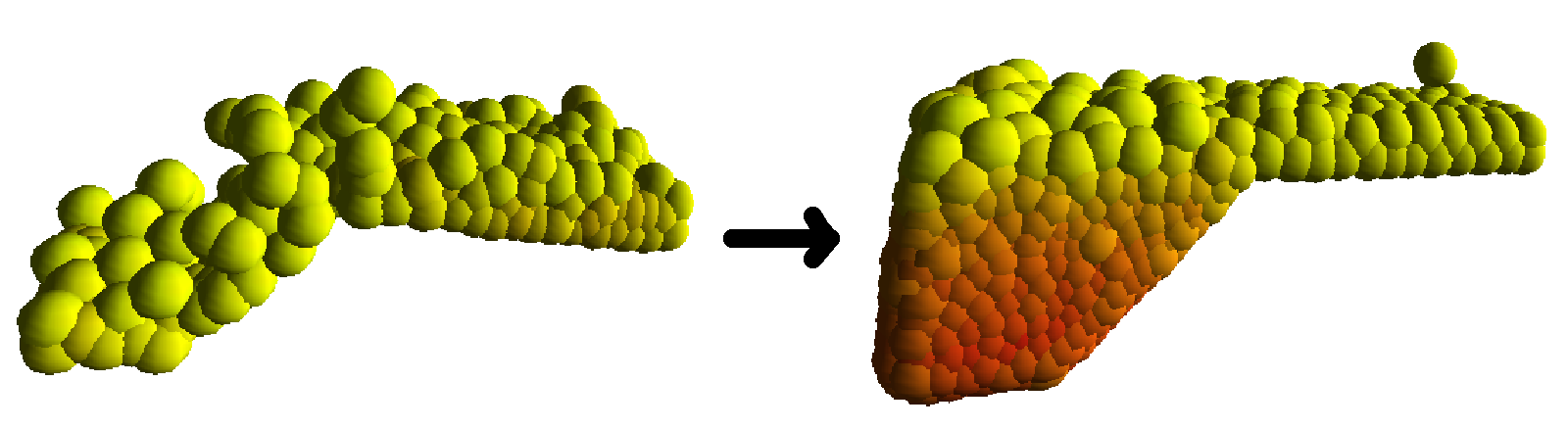
 Da die Anwendungen der Fluidmechanik komplex genug sind, um ein eigenes Labor oder eine Vorlesung zu füllen, stellen wir exemplarisch einen partikelbasierten Ansatz vor, die sogenannten smoothed particle hydrodynamics, in der die physikalischen Eigenschaften des simulierten Mediums an einem Punkt aus den Werten benachbarter Partikel abgeleitet werden. So wird der Einfluss einzelner Partikel auf Größen wie Druck und Flußgeschwindigkeit durch einen sogenannten Kernel dargestellt. Eine zusätzliche Herausforderung sind die, im Gegensatz zum Textil, hochgradig veränderlichen Nachbarschaftsbeziehungen zwischen den Partikeln, die in jedem Simulationsschritt neu berechnet werden müssen.
Da die Anwendungen der Fluidmechanik komplex genug sind, um ein eigenes Labor oder eine Vorlesung zu füllen, stellen wir exemplarisch einen partikelbasierten Ansatz vor, die sogenannten smoothed particle hydrodynamics, in der die physikalischen Eigenschaften des simulierten Mediums an einem Punkt aus den Werten benachbarter Partikel abgeleitet werden. So wird der Einfluss einzelner Partikel auf Größen wie Druck und Flußgeschwindigkeit durch einen sogenannten Kernel dargestellt. Eine zusätzliche Herausforderung sind die, im Gegensatz zum Textil, hochgradig veränderlichen Nachbarschaftsbeziehungen zwischen den Partikeln, die in jedem Simulationsschritt neu berechnet werden müssen.
Die fundamentale Gleichung der Fluiddynamik wird vorgestellt und angewendet um eine einfache Simulation zu erstellen.
Haptik
Während die integration physikalischer Simulation die virtuelle Realität bereits erheblich lebendiger und realistischer Erscheinen lässt, ist die Interaktion mit Maus und Tastatur wenig zufriedenstellend. Haptische Geräte lösen dieses Problem, indem sie es dem Benutzer ermöglichen, Objekte in der Simulation direkt zu berühren und zu manipulieren. Die Echzeitfähigkeit haptischer Anwendungen stellt ganz neue Anforderungen an die Simulation, durch die für ein realistisches Empfinden nötigen und im Vergleich zur visuellen Darstellung extrem hohen Wiederholungsraten von ~1000Hz.
Umfang und Ablauf
Das Labor findet während der Vorlesungszeit wöchentlich statt. Die Laborteilnehmer werden nach einer kurzen Einführungsphase in Projektgruppen unterteilt und bearbeiten ihren Themenbereich in separaten Gruppen. Kurz vor Ende der Vorlesungszeit stellt dann jede Gruppe ihre Arbeit detailliert vor, sodass das Labor zum Ende der Vorlesungszeit abgeschlossen ist. Der erste Labortermin ist am 11. April 2014 um 14:00 im Stahlbausaal (F435). Dort kann eventuell auch ein anderer Termin ausgehandelt werden.
Einen kleinen Ăśberblick ĂĽber die Themen kann man sich in den Ăśberblicksfolien verschaffen.
Sommersemester 2012
Im Sommersemester 2012 haben die Studenten des Kurses unter anderem eine SPH Wasser-Simulation und eine partikelbasierte Textilsimulation programmiert.
Sommersemester 2013
Im Sommersemester 2013 haben die Studenten des Kurses unter anderem eine Billard Simulation und ein inkompressibles Eulerfluid implementiert.
